216 次碰撞 36 车封闭高速路 生还率仅有?% 36 Cars, 216 Crashes Closed Highway ADAS Test! ?% Survival!
admin
#1 · https://www.youtube.com/watch?v=0xumyEf-WRI
抖音懂车帝做的这期节目非常幽默,强烈推荐思考道路安全的门友观看。


秦 L 语音提示幽默得一批,不过还是停下来了,但是汉和宋没有停下来,海鸥最好玩,走走停停。即便软硬件相同,AI 也可能做出不同的选择。
自动驾驶还会嗯喇叭(问界还会自动用远光灯闪前车)

零跑更牛逼,直接从车底把模型卡车撞飞。🤯

共性特点:
-
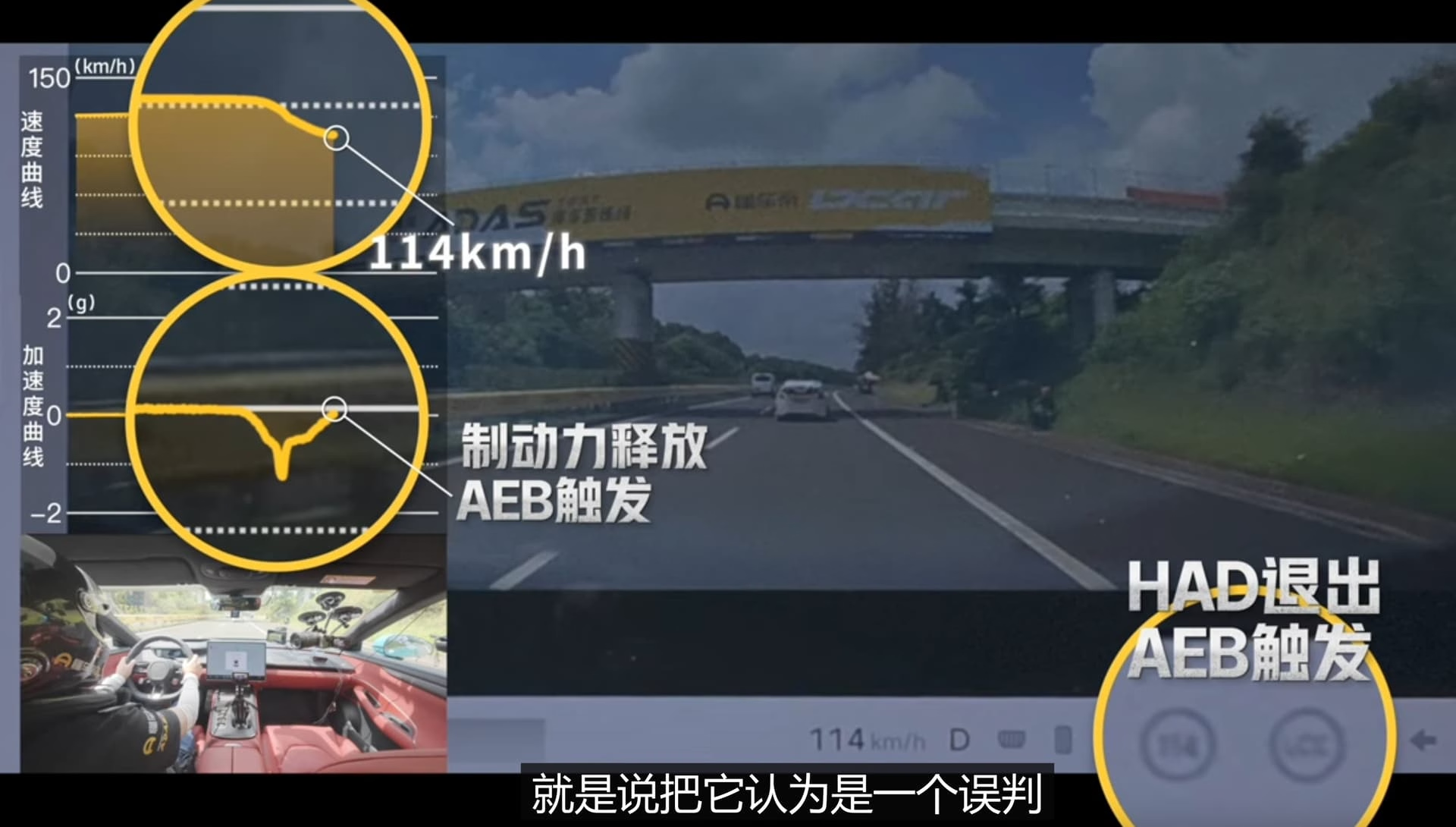
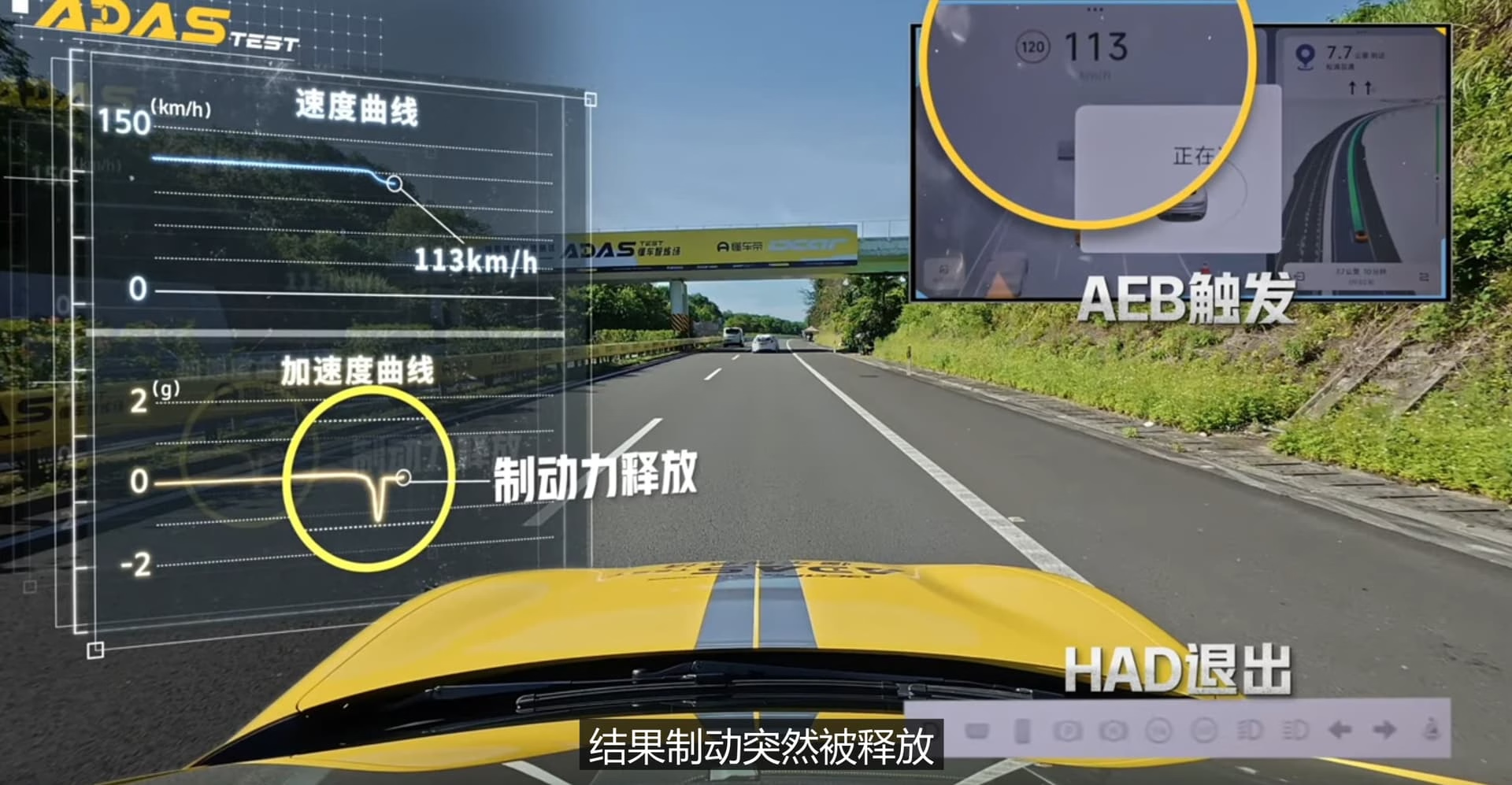
都喜欢在碰撞前 1s 提示你“自动驾驶已退出,请接管”,这样出了事可以说最后那下是司机自己撞的。😅
-
宁肯撞车,也不肯保守一点提前减速/刹车。很多车夜间也 130km/h 自动驾驶巡航。
看完了,我的观点还是跟以前一样,应该禁止任何形式的自动驾驶。
也许有人会说现有的模型还不够完善,训练数据不够多,等技术成熟就好了。
那拥有更保守的规则的自动驾驶又能值得信任吗?
我觉得还是不行。
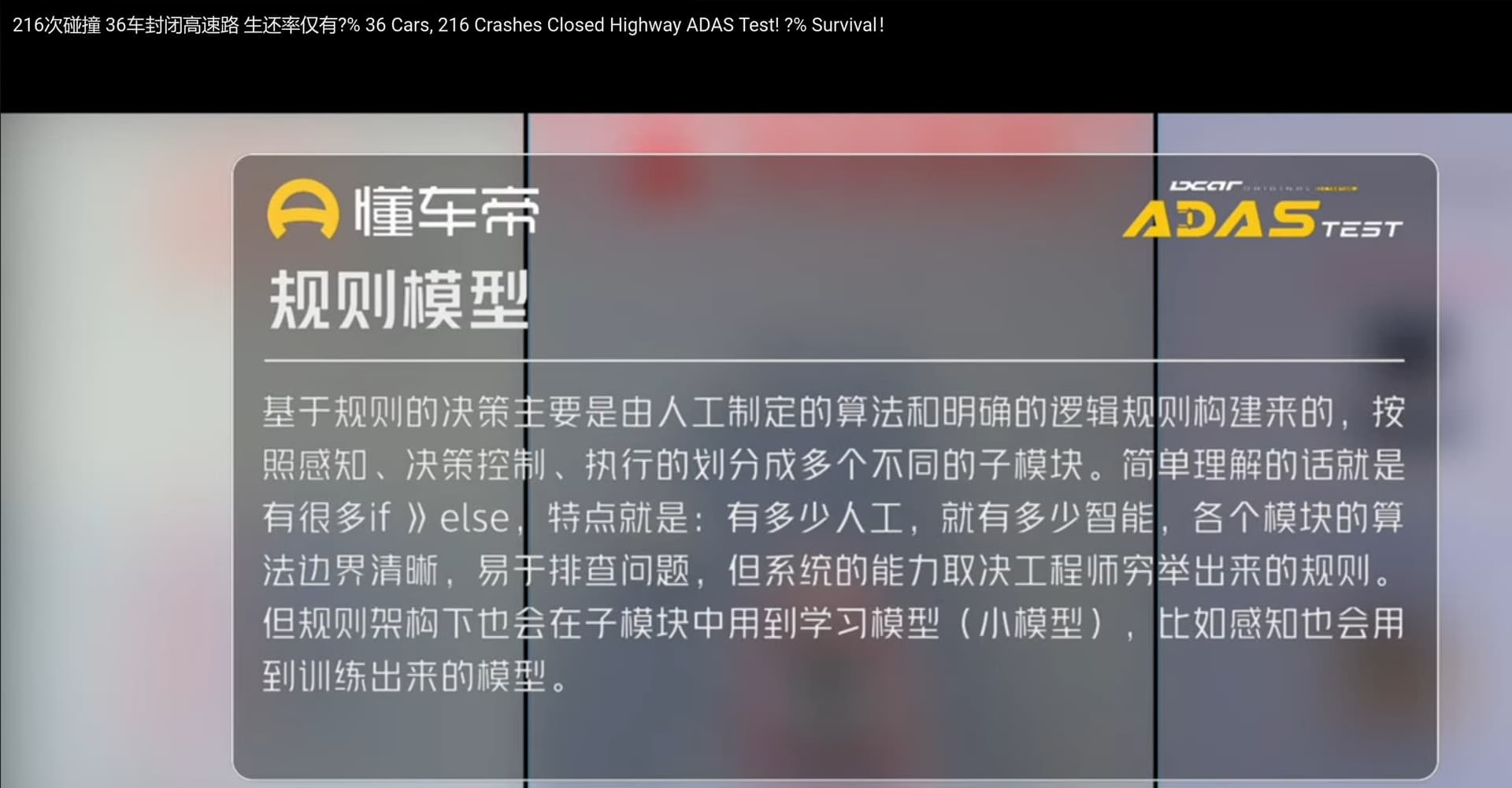
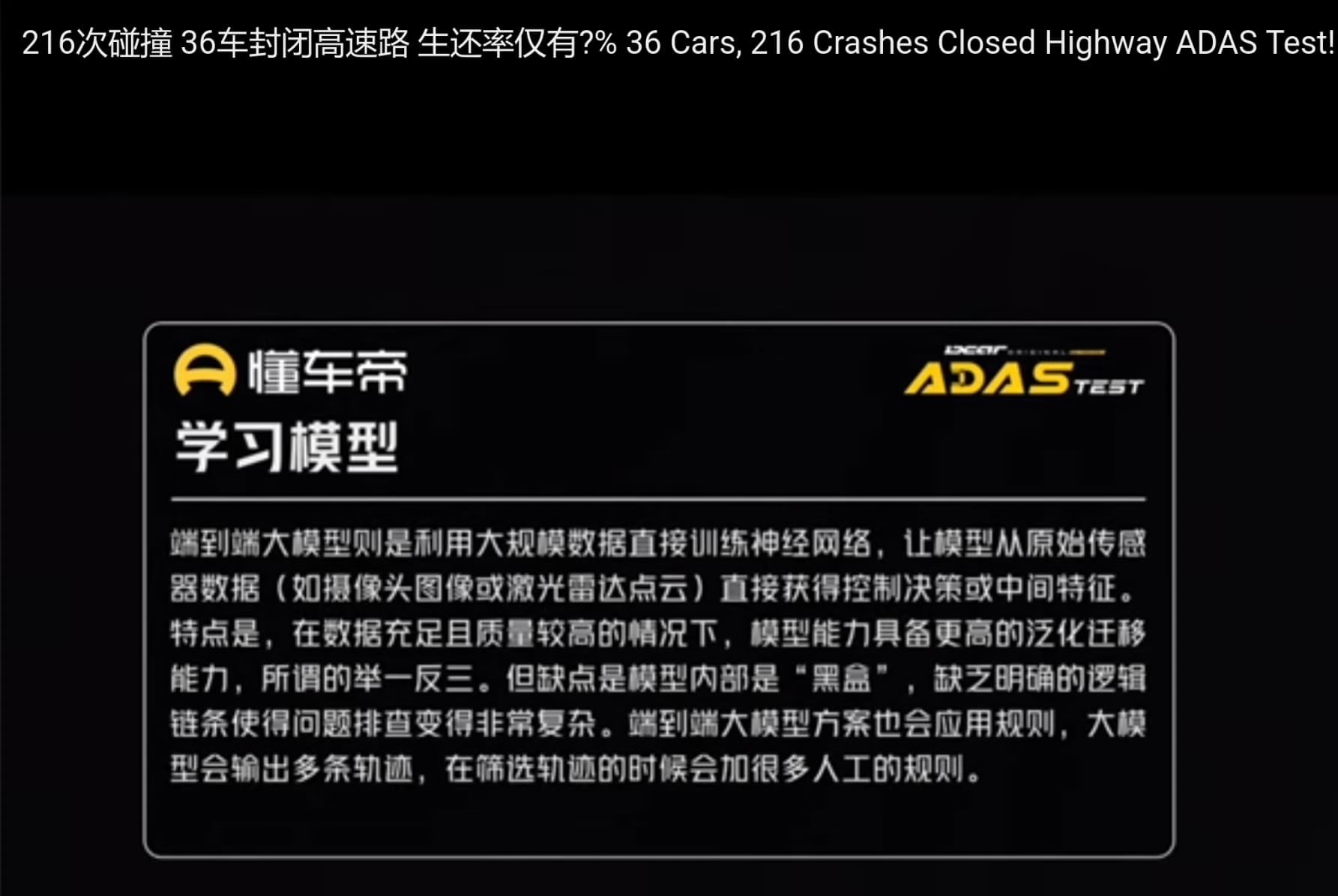
- 基于学习的方法:训练数据的质量:数量、场景多样性,存在小概率但高损害的场景
- 基于规则的方法:人类人值得偏差,难以列举全部规则,难以具体场景具体分析,规则太多且耦合会产生意想不到的后果:
e.g. Imaginability plays an important role in the evaluation of probabilities in real-life situations. The risk involved in an adventurous expedition, for example, is evaluated by imagining contingencies with which the expedition is not equipped to cope. If many such difficulties are vividly portrayed, the expedition can be made to appear exceedingly dangerous, although the ease with which disasters are imagined need not reflect their actual likelihood. Conversely, the risk involved in an undertaking may be grossly underestimated if some possible dangers are either difficult to conceive of, or simply do not come to mind. (from Thinking, Fast and Slow)
也有很多畜生司机/视力不好的了/经验不足的人/反应能力偏慢的人开得还不如 AI。不过我建议这些人还是不要开车为好 😆
也就自动停车好的话可以用一下,虽然听说也有撞的
mod
#4 · 我只看了封闭环岛那一期,确实给我很大惊吓,之前以为辅助驾驶基本上是手放在方向盘上看着它发挥不出错就行了,但测试给我的感觉是随便一个地方就可能需要司机接管,而且连最起码的判断不出时立即提醒接管都做不到,几乎都是事故后才提醒接管。如果是这样还真不如自己开
